Marcelo Contreras
Perception engineering | vSLAM | DL | Motion planning

I am currently a Master’s student at University of Alberta working with Professor Ehsan Hashemi as part of the NODE Lab. My research intends to develop reliable autonomous navigation systems for adversarial scenarios (dynamic surrondings, light conditions and weather) and lies as a mixture of SLAM, Graph Optimization, Deep Learning (DL) and State Estimation. I started at NODE Lab as visiting scholar in 2023, supported by the ELAP scholarship granted by Canadian government.
Previously, I received my Bachelor’s degree in Mechatronics Engineering with a minor in robotics from the Universidad de Ingenieria y Tecnologia, Lima, Peru in 2023. My thesis was focused on electroencephalography (EEG) decoding for stimulus prediction through a Transformer DNN fused with Interval Fuzzy Type-2 (IFT2) units that can handle uncertainties and improve predictions, and it was supervised by Professor Christian Flores
🔥 News
| Feb 17, 2026 | Paper accepted@MDP Sensors: Our work on Design of a 3D High-Definition Map Visualizer for Pose Estimation and Autonomous Navigation in Dynamic Environments was accepted to MDP Sensors |
|---|---|
| Jul 24, 2025 | Started research stay in Karlsruhe Institute of Technology (KIT) as part of Institute of Measurement and Control Systems (MRT). |
| Jun 14, 2025 | Paper accepted@IEEE ITSC 2025: Our work on Robust 3D Bounding Box Detection and State Estimation of Dynamic Objects for Autonomous Navigation was accepted to IEEE ITSC 2025 |
| Mar 28, 2025 | NODE Lab has been promoted in latest issue of IEEE ITS Research Lab. |
| Oct 07, 2024 | Paper accepted@SMC 2024 Our work on EEG-TCF2Net: A Novel Deep Interval Type-2 Fuzzy Model for Decoding SSVEP in Brain-Computer Interfaces was accepted to IEEE SMC 2024 as a regular conference paper. |
📝 Selected publications
- SMC
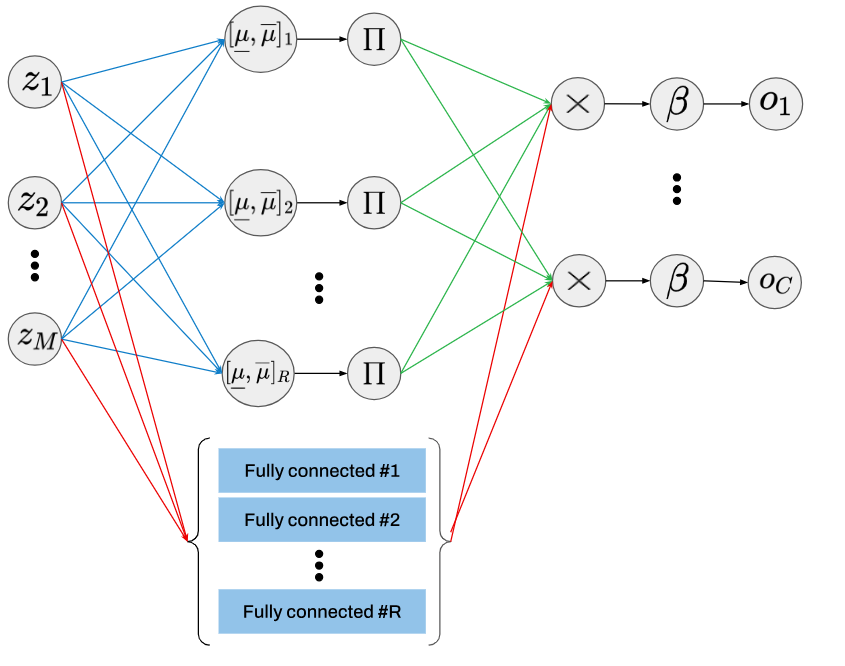 EEG-TCF2Net: A Novel Deep Interval Type-2 Fuzzy Model for Decoding SSVEP in Brain-Computer InterfacesIn 2024 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2024
EEG-TCF2Net: A Novel Deep Interval Type-2 Fuzzy Model for Decoding SSVEP in Brain-Computer InterfacesIn 2024 IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2024 - T-IV

🎓 Academic Service
Organizing
- Organizer of the ECCV 2024 Workshop on Robust, Out-of-Distribution And Multi-Modal models for Autonomous Driving (ROAM)
Reviewing
- Reviewer of IEEE Intelligent Transportation Systems Conference (ITSC)